SLAM (1)
복습 겸 SLAM의 흐름에 대해서 담은 게시글이다.
SLAM이란?
SLAM이란 Simultaneous Localization and Mapping 의 약자로, 동시에 로봇의 위치와 지도를 만드는 것을 이야기한다.
- 움직이는 로봇이 자신의 위치를 알고 있으면 지도를 만들 수 있고,
- 지도를 만들면 자신의 위치를 알 수 있기 때문에 이 둘을 동시에 해결하는 것이 SLAM이다.
SLAM의 흐름
SLAM의 흐름은 크게 3가지로 나눌 수 있다.
- 센서 데이터를 받아서
- 로봇의 위치를 추정하고
- 지도를 만든다.
센서데이터
기존적으로 SLAM의 데이터는 Lidar, Camera, IMU, 모터의 encoder 등이 있다.
주변 환경을 인식하는 센서 : Lidar, Camera 등.. 로봇의 움직임을 인식하는 센서 : IMU, 모터의 encoder 등..
🌱환경 인식 센서
Lidar의 종류는 크게 2가지로 나눌 수 있다.
- 2D Lidar
- 3D Lidar
Camera의 종류
- Monocular Camera (단안)
- Stereo Camera (쌍안)
- Depth 측정이 가능한 카메라
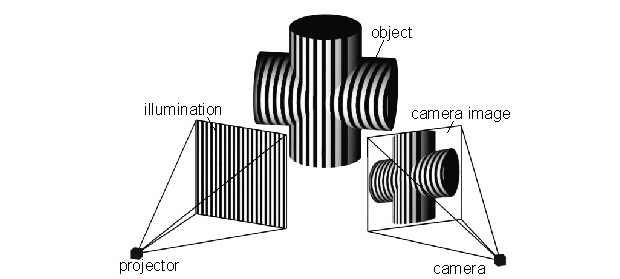
ToF[^1] , Structured Light[^2] 등…
🤖로봇의 움직임 인식 센서
IMU란 Inertial Measurement Unit의 약자로, 가속도 센서와 자이로스코프 센서를 합친 것이다. 도움링크 : IMU란?
- 3축 가속도 센서
- 3축 자이로스코프(각속도 센서)
- 3축 지자기 센서(일부 IMU에만 존재)
로봇의 위치 추정
받은 데이터를 기반으로 로봇의 위치를 추정한다.
원리 도움링크 : Matlab_Slam_설명
원리에 대해서 쉽게 잘 설명 되어 있다.
센서데이터 처리
받은 센서데이터들은 오류들이 많아서 데이터 처리과정을 꼭 해야한다. 주로 (1)노이즈 제거, (2)데이터 정합, (3)데이터 보간 등의 과정을 거친다.
센서 데이터 처리는 센서마다 다르기 때문에, 센서 데이터 처리에 대해서는 따로 정리하도록 한다.(vision, lidar, imu 등..)
로봇의 위치 추정 로봇의 위치를 추정하는 방법은 여러 위치 추정 알고리즘에 의해 실행된다.
- EKF (Extended Kalman Filter)
- UKF (Unscented Kalman Filter)
- PF (Particle Filter)
- 등등..
다음 게시물에서 설명 예정
[^1] : Time of Flight, 광학적인 방법으로 거리를 측정하는 방법이다. 광원에서 광선을 쏘고, 물체에 반사되어 돌아오는 시간을 측정하여 거리를 측정한다.
[^2] : 구조광 방식은 빛을 투사하여 물체의 형태를 파악하는 방식이다. 빛을 투사하여 물체에 반사되어 돌아오는 빛의 패턴을 통해 물체의 형태, 거리를 파악, 측정한다.